ライントレースロジック
ライントレースマスク・閾値に基づく走行、および交差点・距離・壁際での停止の考え方
共通事項
- 二値化された白の塊の中心を走行
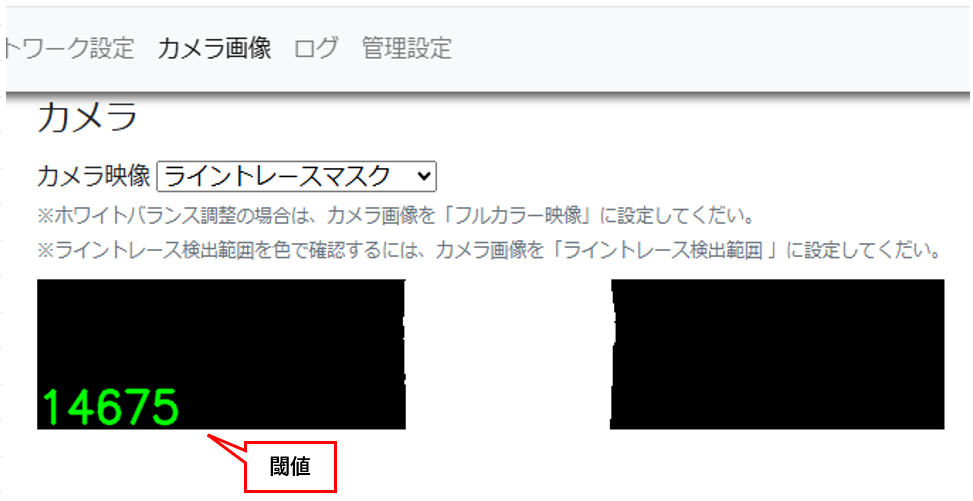
- 二値化画像の確認方法
管理画面 → カメラ画像 → ライントレースマスク
交差点で停止
- 閾値が20,000を超えると減速 (6秒間閾値が見えない場合は減速リセット)
- 閾値が20,000を下回ると次の20,000を超えることを待つ
- 閾値が20,000を超えると停止
距離で停止
- 走行開始した地点から指定した距離を進んで停止します。
※モータのエンコーダで測定した値となりますので、駆動輪のスリップや摩耗、偏荷重などにより誤差が発生します。
また、停止位置精度は、開始地点が自律移動の精度に左右されます。
よって、ライントレース使用時の停止位置精度保証外となります。
壁際で停止
- ALI前面の障害物センサーを用い、壁までの距離を見て停止します。
※ 障害物センサーの校正が必要です。
詳細は取り扱い説明書ご参照ください。