REST API ver1.08 への追記事項
★T2 タスクセットのダイレクト再⽣
| Path | Method | Function |
|---|---|---|
| /v2/taskset/direct_exec | POST | taskSet を直接再生する |
Request Body
json
jsonjson
{
"cmds" <string> # taskset json
}例
json
jsonjson
※ cmds については、本ドキュメント後半 の「cmds について」を参照下さい。{
"cmds":[{
"cmdType":100,
"arg":{
"x":5.2308,
"y":1.0413,
"theta":0.3915,
"ignoreTheta":false,
"passingPoint":false,
"name":"TEST",
"disableStartAnnouncement":true,
"disableStopAnnouncement":true
}
}]
}APIプラットフォーム(例:Postman)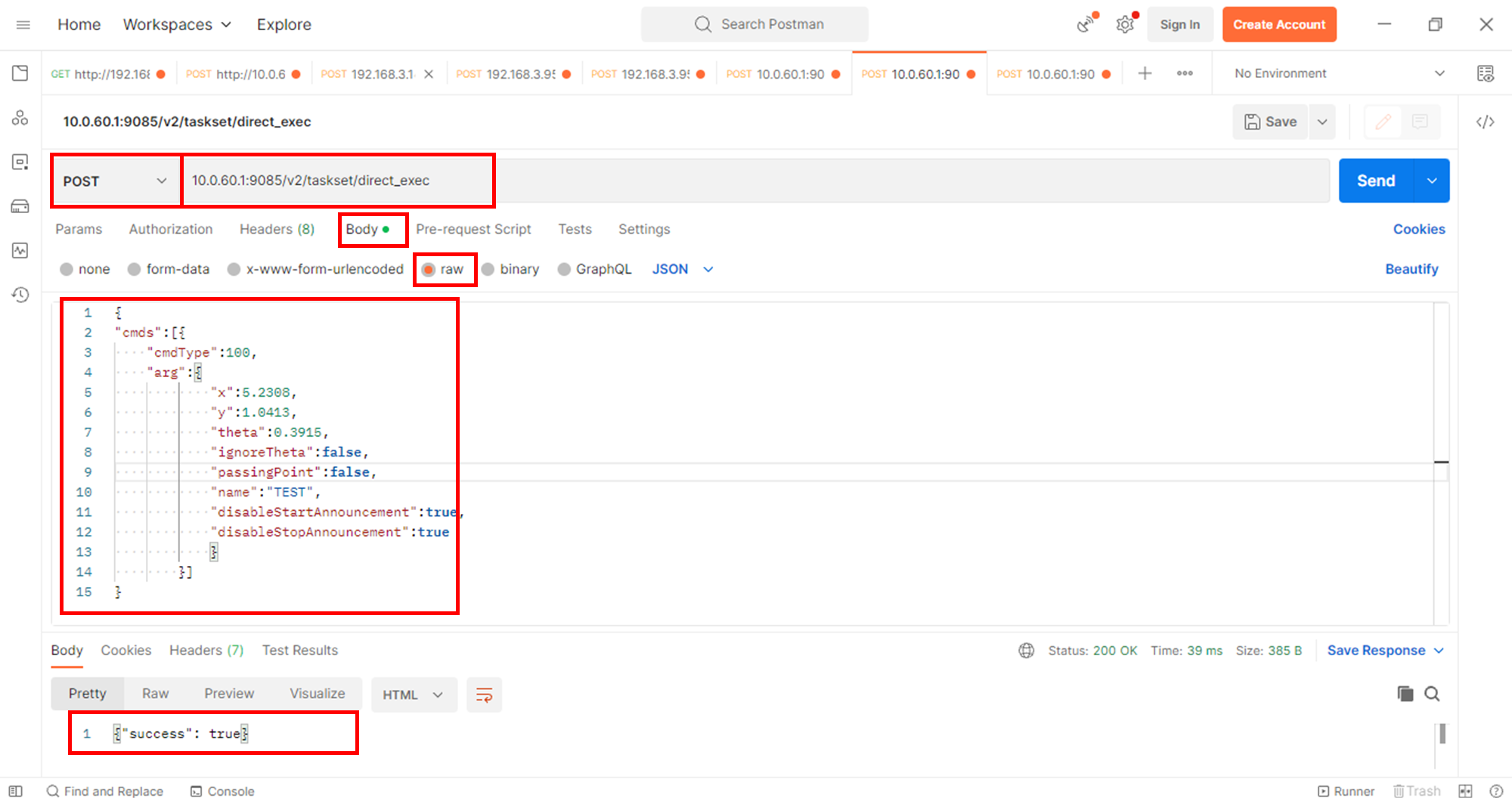
参考コード例 Python
json
import requests #「requests」ライブラリのインストールが必要です
import json
url = 'http://192.XXX.X.XX:9085/v2/taskset/direct_exec' #IPアドレスを入力
params = {
"cmds":[{
"cmdType":XXX, #cmdTypeを入力
"arg": {
… #cmdTypeに合ったcmdsの内容を記述
}
}]
}
res = requests.post(url, json=params)
data = json.loads(res.text)
print(data)参考コード例 Javascript
json
<script>
let request = new XMLHttpRequest();
request.open('POST', 'http://192.XXX.X.XX:9085/v2/taskset/direct_exec', true);#IPアドレスを入力
request.setRequestHeader('content-type', 'application/json;charset=UTF-8');
request.responseType = 'json';
let body = {'cmds':[{'cmdType':XXX', arg':{…}}]}; #cmdTypeに合ったcmdsの内容を記述
request.send(JSON.stringify(body));
request.onload = function() {
window.alert( JSON.stringify( this.response ) );
};
</script>
★cmdType の定義 への追記事項
| CmdType | name | Data schema | Example |
|---|---|---|---|
| 20 | Pause taskset execution タスクセットの一時停止 | json | json |
| 100 | Move To Postion座標移動 | json | json |
| 110 | Follow path経路移動 execution タスクセットの一時停止 | json | json |
| 200 | LineTracerライントレーサ | json | json |
| 610 | Set Footprintフットプリント変更 | json | json |