自己位置ロストTips
自己位置ロスト トラブルシューティング Tips
問題
発生している問題
KeiganALI の運用中に、自己位置を正しく保持できなくなることがあります。
症状
自己位置ロストが発生した際の症状
- 自己位置ロストにより、エラー 110001 が発生する
- 認識位置のずれにより、ライントレース開始位置がずれ、ライントレースに失敗する
- ALI が認識している位置と実際の停止位置が一致せず、正しい位置で停止できない
原因
「現在ALIが認識している情報」と「予め取得したマップ情報」を正しく一致させられない場合などに発生します KeiganALI の運用中に、自己位置を正しく保持できなくなることがあります。
- 設備の移動や一時的な障害物など、著しく環境が変化している
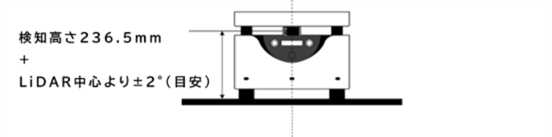
- LiDAR 高さに、連続した平面(安定して検知できる面)が存在しない
- コンベアなどの設備が細いフレーム構造で、LiDARが検知しにくい
- 反射の強い素材またはガラスにより、点群が安定しない
- マップ上の壁と、実際の設備の位置・形状が一致していない
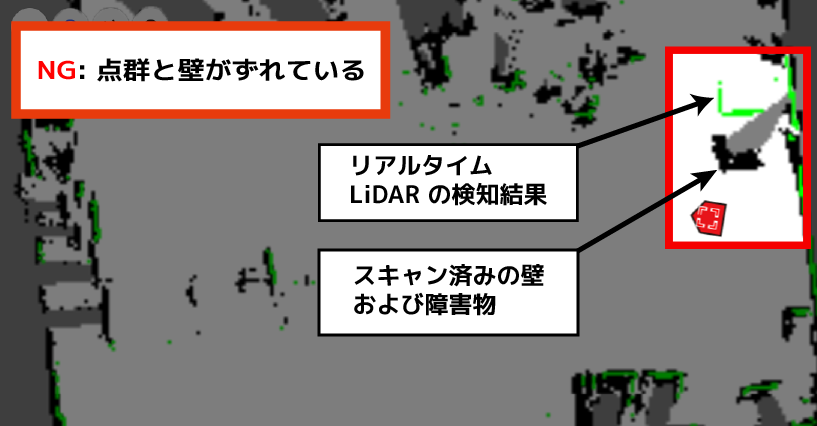
自己位置ロスト発生する可能性あり
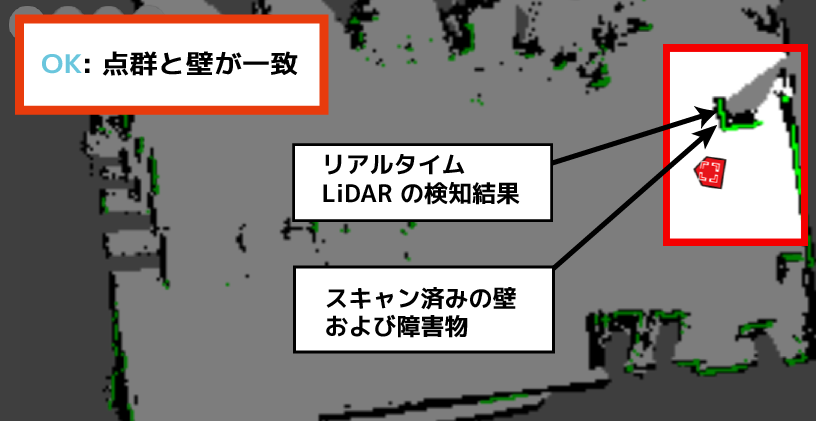
正常に自己位置を認識できている状態
対策
LiDAR が検知しやすい「見える壁」を作る
LiDAR が安定して検知できない環境では、意図的に分かりやすい目印を作る必要があります。
高さ: ALI の LiDAR 高さに合わせて、連続した平坦なパネルを設置する
材料: 非透明で、幅のある平面(例:プラスチック段ボールなど)を使用する
設置場所: LiDAR高さでの周囲環境が変わりやすい場所。(パレット置き場。台車置き場など)への設置が有効です
- 隙間が多い場所(コンベア側面)
- 停止位置周辺
- 自己位置がズレやすいエリア
マップ修正
パネル設置後は、「再スキャン」「撮り直し」「マップの修正」 のいずれかを実施してください。ALI が特徴として認識しやすい壁や角が、実環境とマップ上で正しく配置されていることを確認してください。
確認
LiDAR 点群とマップの一致を確認する
- ホーム画面またはマップ編集画面からマップを表示し、パネル位置を基準として
 ボタン操作により確認を行う
ボタン操作により確認を行う - 緑色の LiDAR 点群が、マップの黒い壁の線上に重なっているか
- 旋回中は LiDAR の点群が一時的にずれて見えることがありますが、旋回後にマップ上の壁と一致すれば問題ありません
再テストを行う
点群とマップの一致を確認した後、以下のテストを実施します。
- 複数の経路で再走行
- 指定した停止位置が正確か確認
- 「座標移動」を数回実施
- 走行中も自己位置がズレないか確認
もしズレが再発する場合は、パネルの位置やマップの壁を再度確認し、必要に応じて追加してください。